The experiments shown here were developed in my 5th semester. The focus of the work is mainly on process design as well as generative design using a 6-axis robotic arm UR5 from Universal Robots. As part of this project, we systematically explored aesthetic phenomena in small groups.
In several steps we approached the topic of controlling the robot via the software Grasshopper and Rhino as well as the design of entities made of different materials in three-dimensional space.
Clay Forming

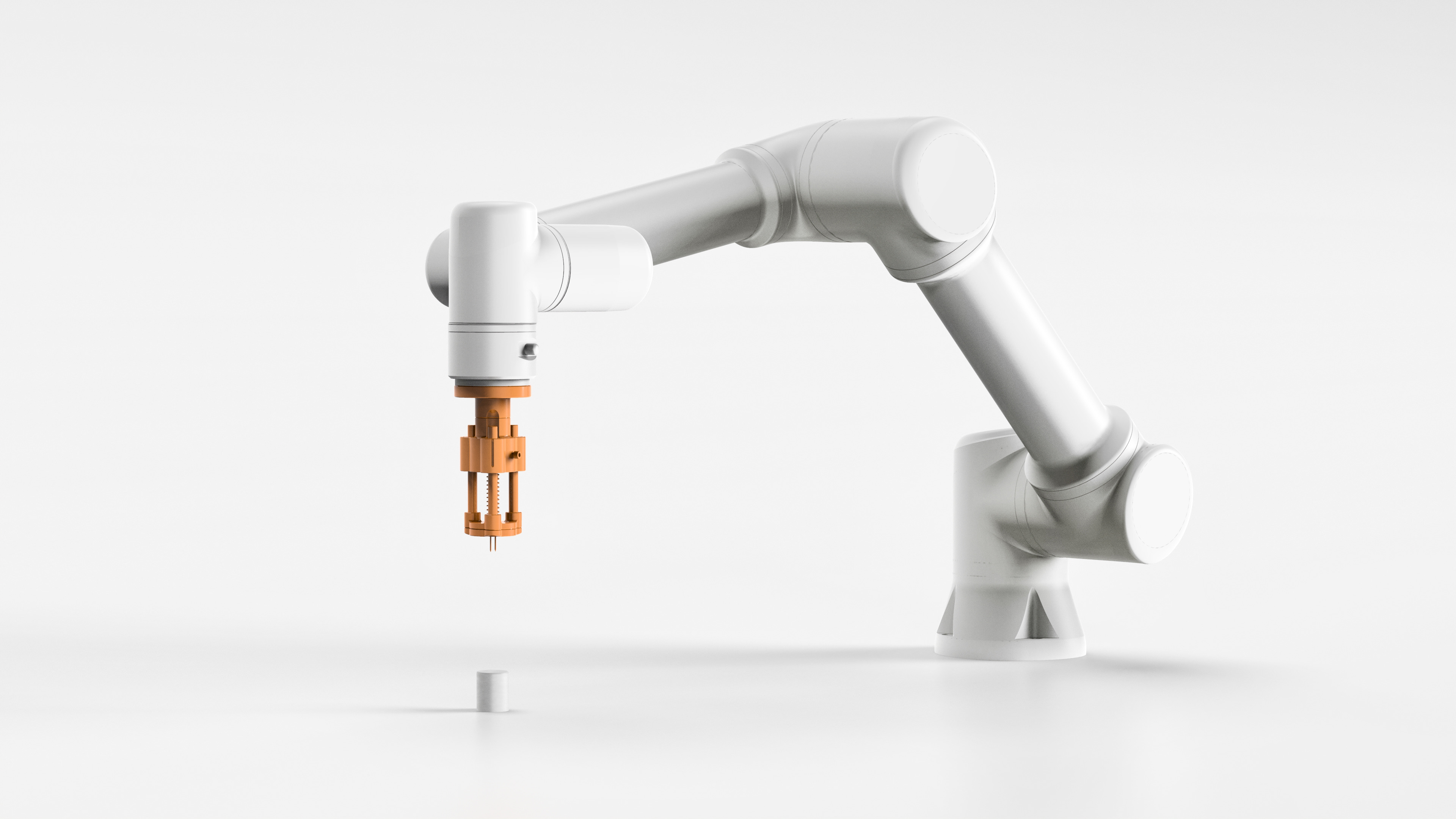
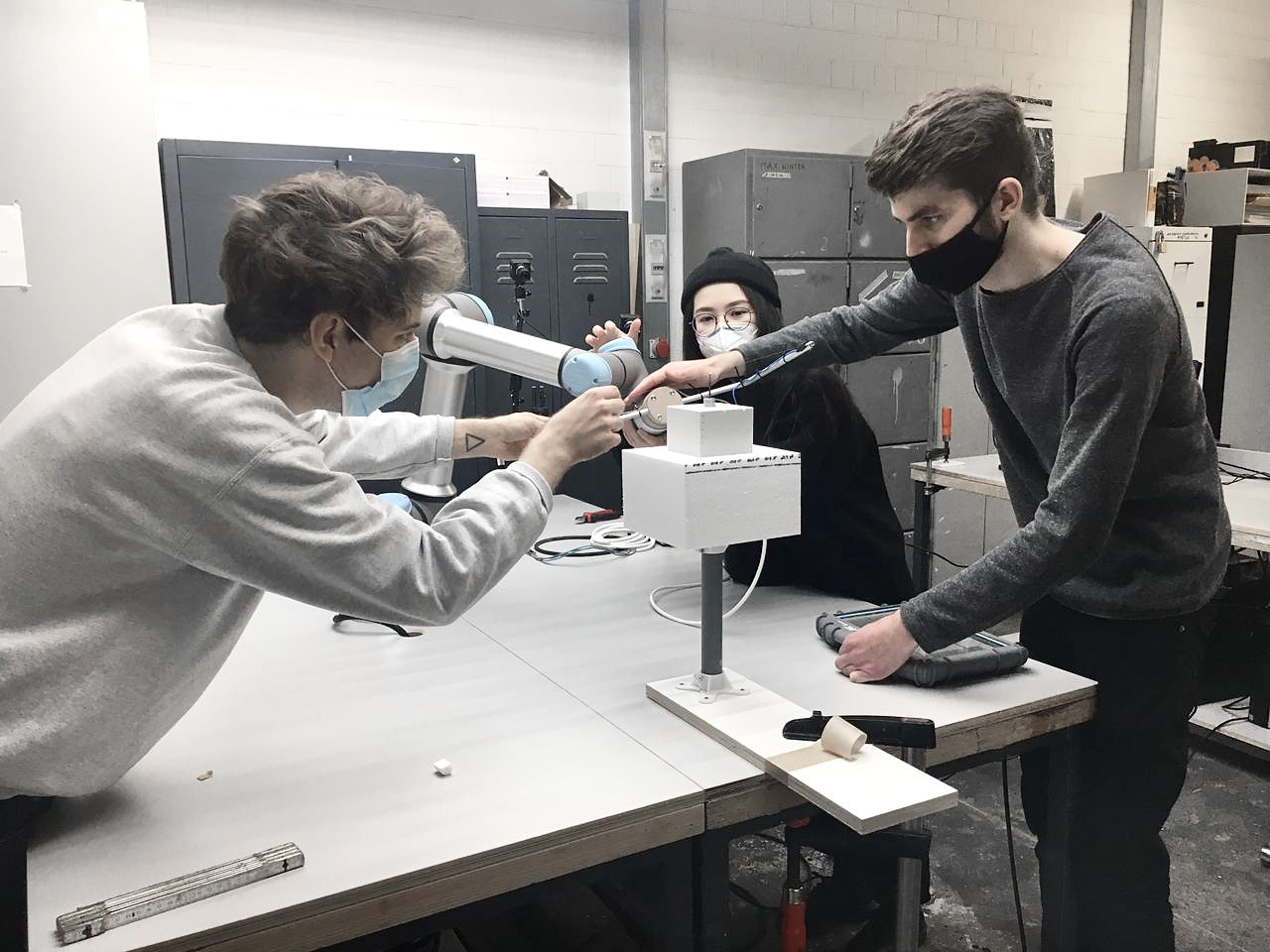
The focus of the Clay Forming experiment is on additive manufacturing with clay. We specifically dealt with the stacking and shaping of clay cylinders. With the selective deformation of the cylinders through the robot, we tried to explore the limits of the material. When programming with Grasshopper, one of the most important parameters was the contact pressure between the clay cylinder and the base plate. The clay cylinders were picked up by the robot from a magazine and transported to the next position. At the target position, the robot set the cylinders down. The angle, contact pressure and position of the cylinders were decisive for the aesthetic quality of the structures.


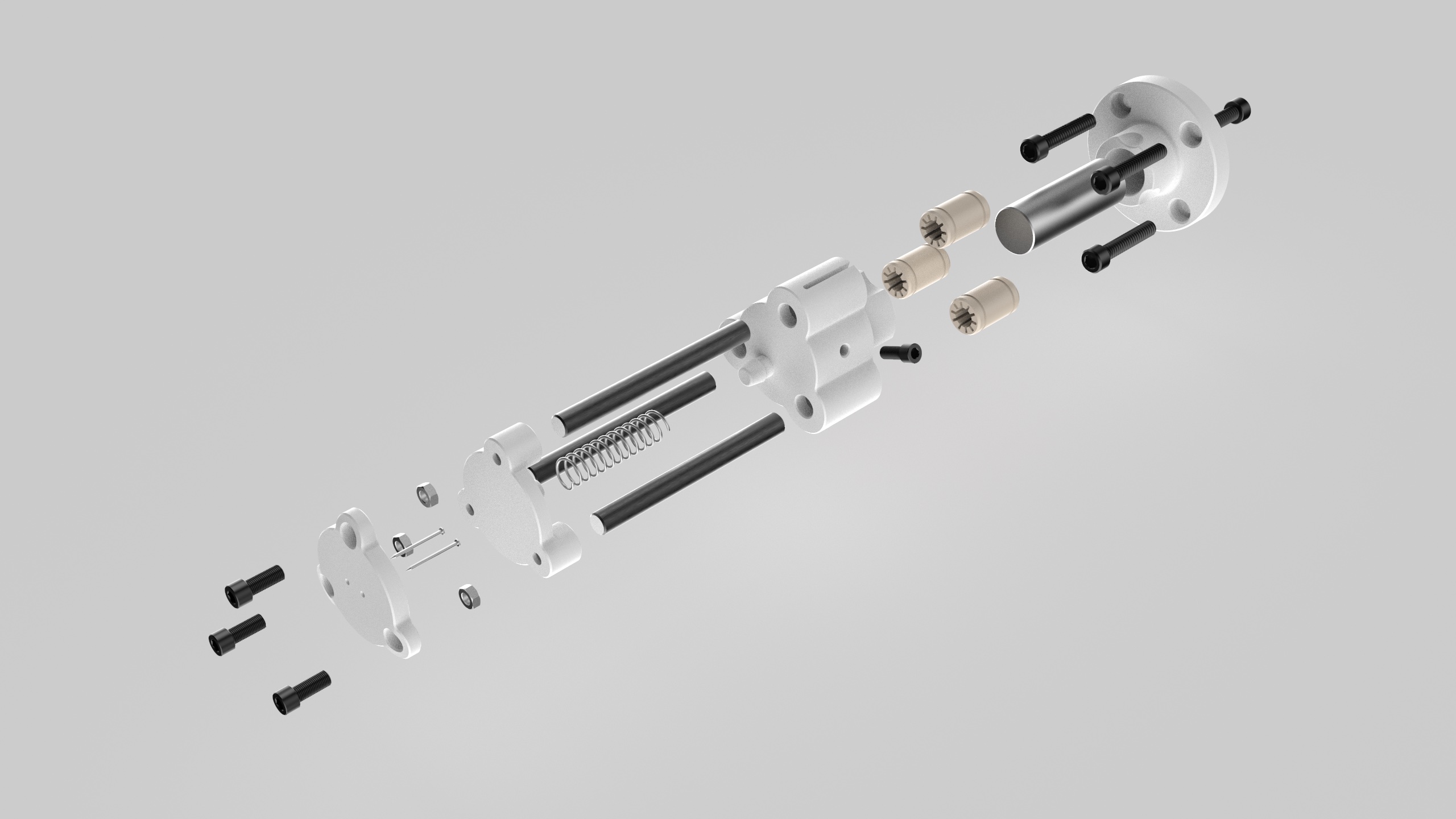
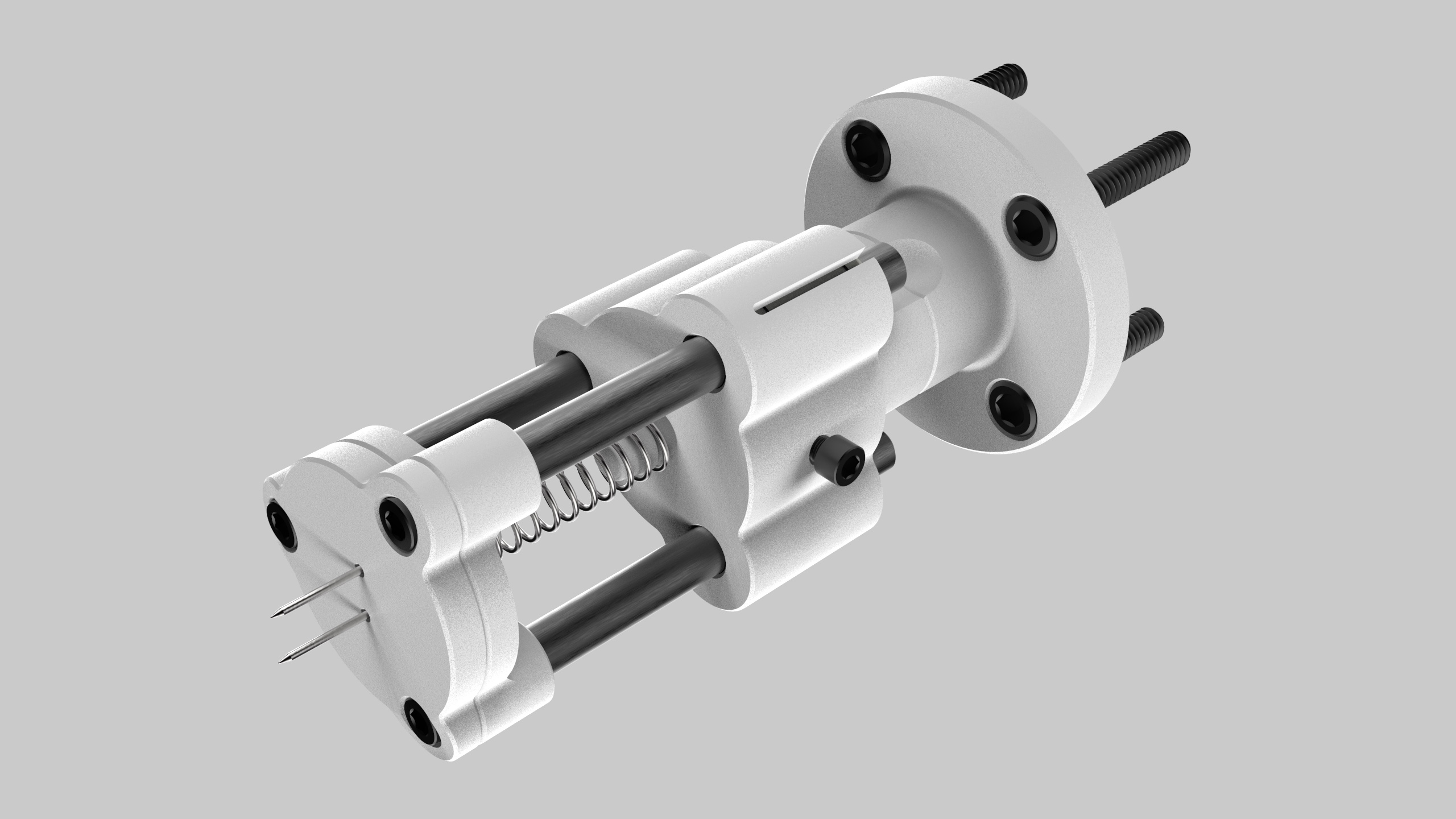
The picker was designed to hold the clay cylinders. It consists largely of 3D printed parts. The pick-up plate at the front is replaceable. The different surface designs were used to investigate how the clay sticks best to the tool. When setting down the cylinders, the surface texture of the substrate plays a major role.
The clay could be optimally picked up by the tool with differently perforated pick-up plates. The inclination of the tool tip allows especially surfaces to be processed well.


The clay cylinders, which were lined up, are pressed with different pressures and stacked on top of each other, resulting in agglomeration in the horizontal and vertical directions.

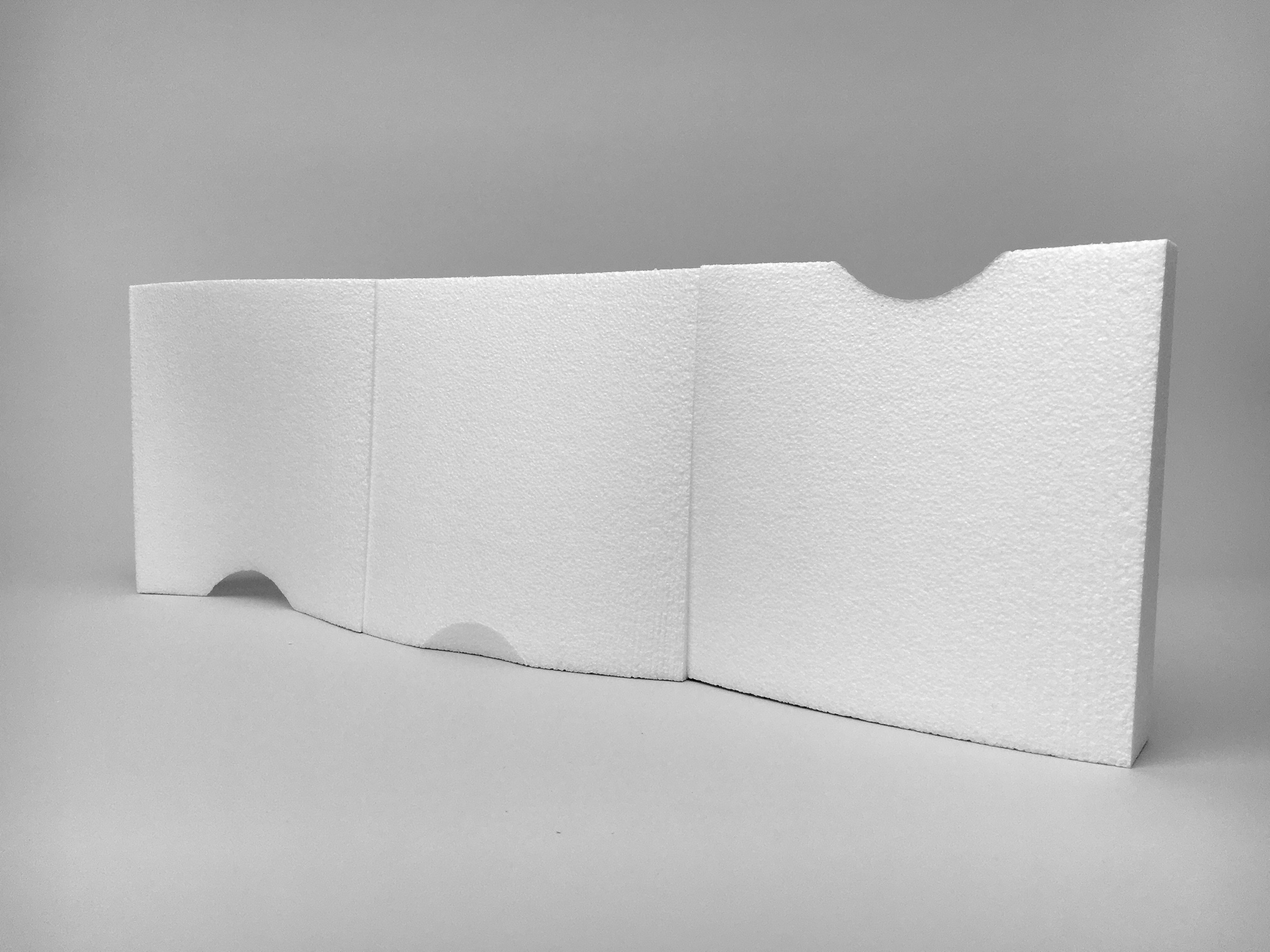
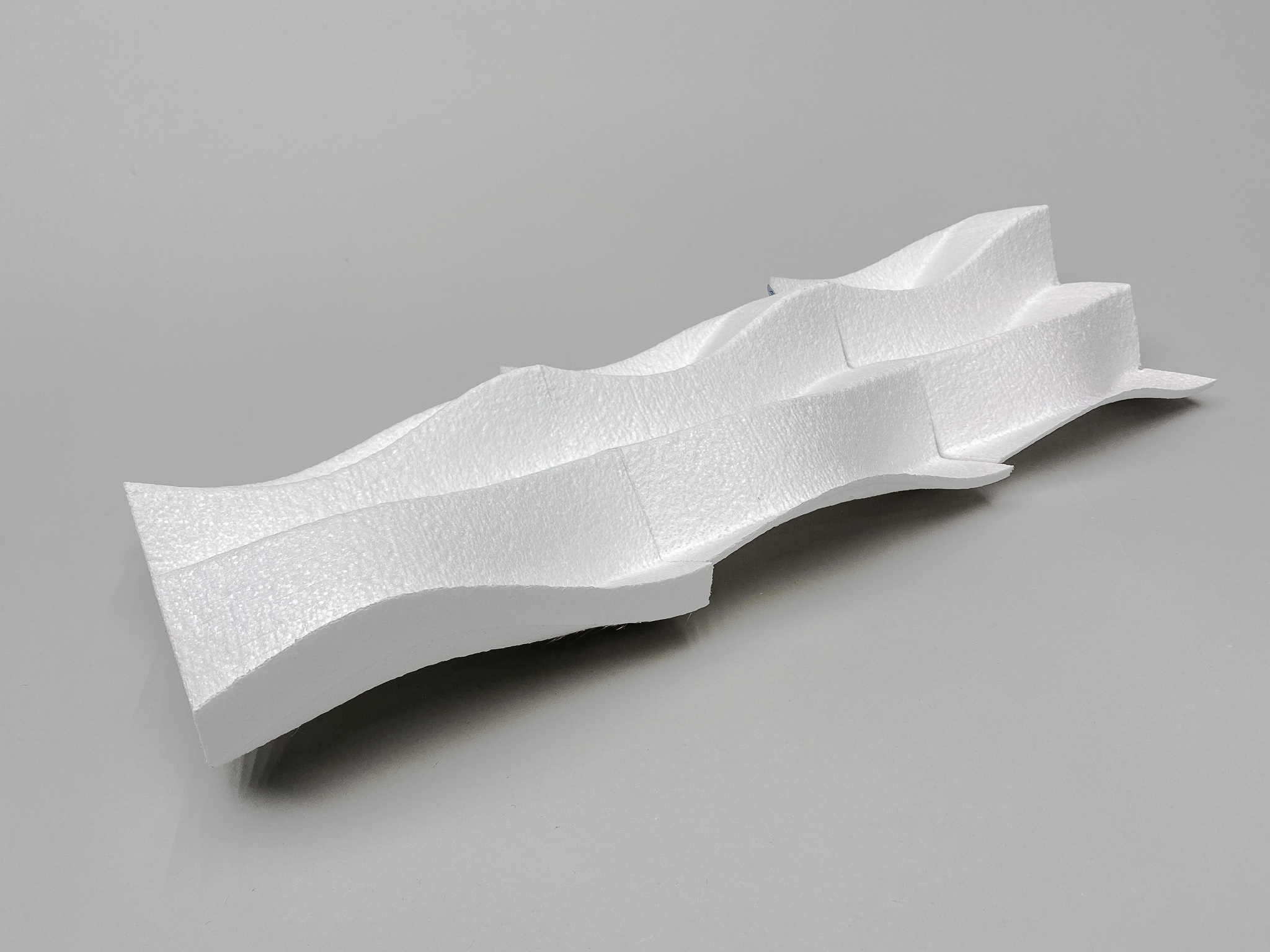
Hotwire Cutting
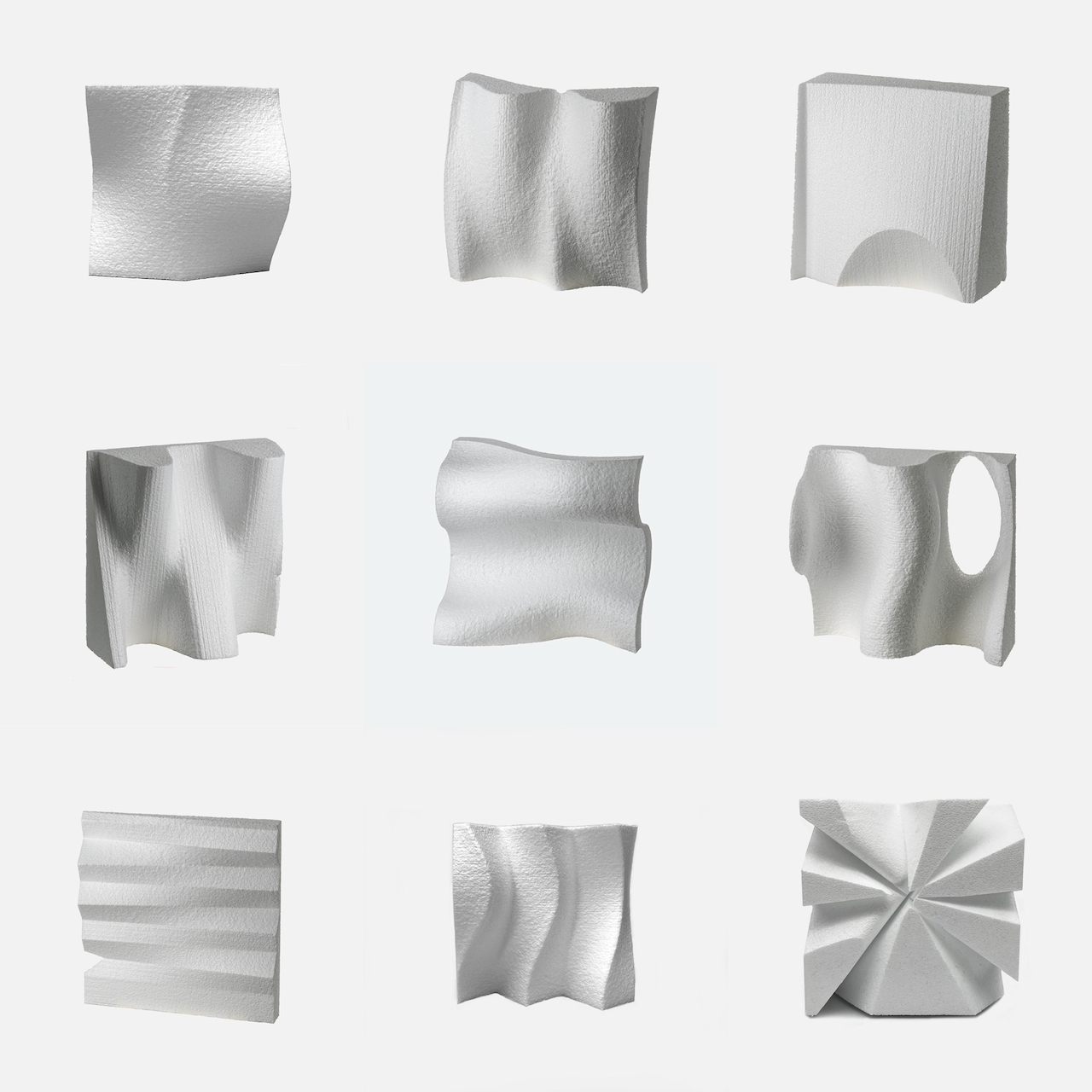
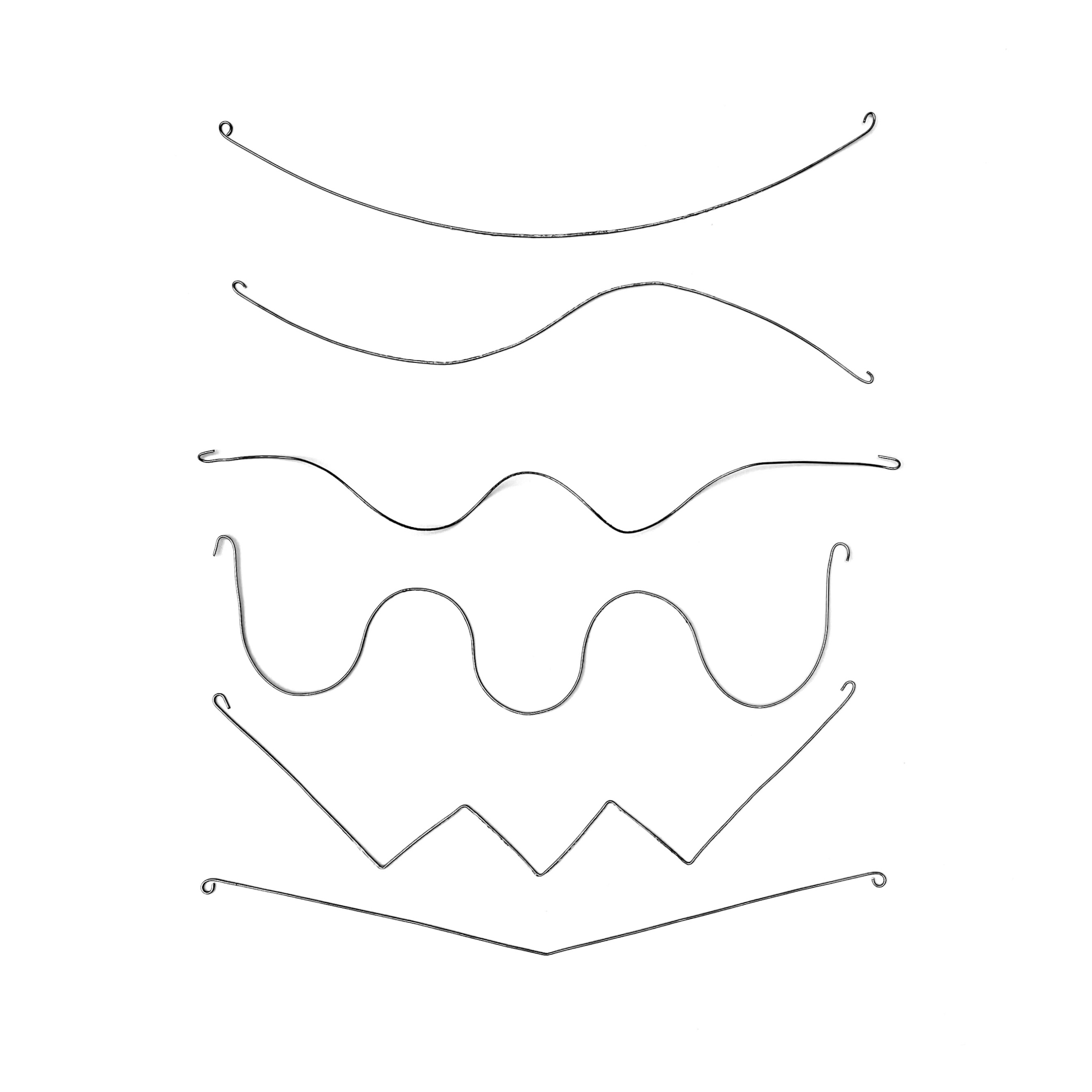
For the Hotwire Cutting experiment, the robot arm was equipped with a hot wire cutter. With the help of the hotwire cutter and the code programmed in Grasshopper, it was possible to cut shapes from the polystyrene block that would not have been possible with a conventional StyroCutter. Parallel to the design of the process, we turned our attention to the tools used. In addition to the curve programmed in Grasshopper, which the robot traverses, the shape, thickness and heat of the wire in particular influenced the shape.
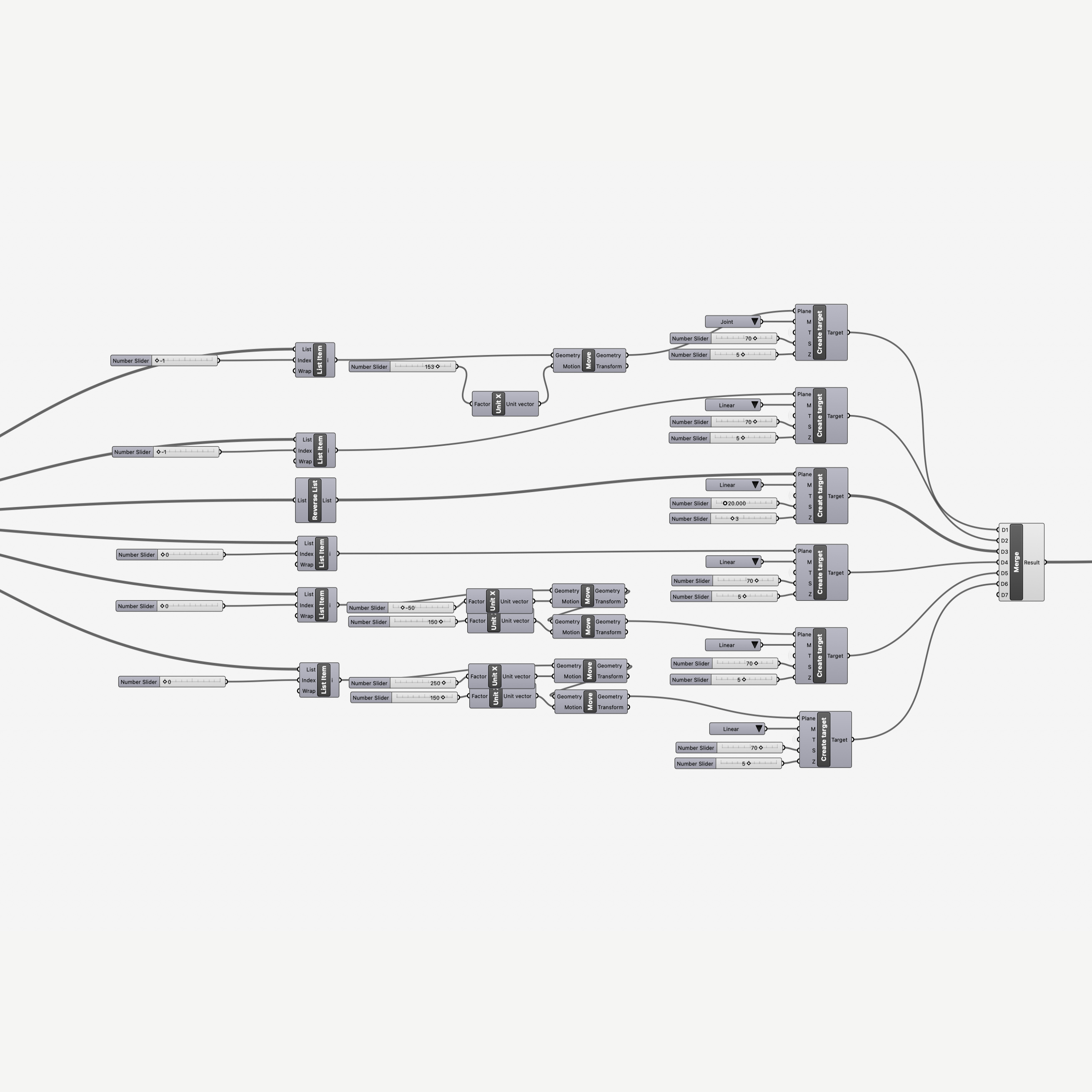
The robot was programmed with the Grasshopper software
A simulation of the Grasshopper script in Rhino

The works shown here were developed in my 5th semester together with Natalie Preuß, Wei-Ping Lu and Moritz Müller and other students at the weißensee kunsthochschule berlin.